BEAM Robotics- based on Nervous Network Technology
Here are is a scant collection of robots built by yours truly.

|
BEAM Robotics- based on Nervous Network Technology
Here are is a scant collection of robots built by yours truly.
|
|

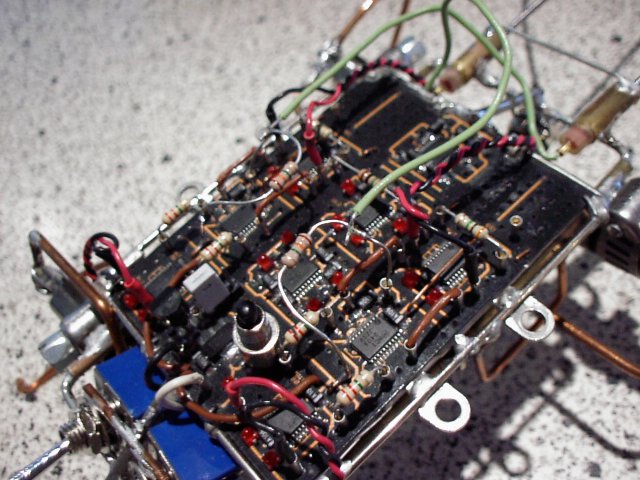
ELECTRONICS
The electronics of this bot are
quite simple. Everything is built around a standard quadcore. Only 4 Nv-
neurons control each of the robot's motions. One inverter is used in a
PNC style circuit and the other is used as a reverser for the waist.
The robots sensors are directly connected to the microcore, and work by
shortening and lengthening a particular pulse. One of the disadvantages
of this set up is that if, say, the RLBS and LLBS sensors are both
triggered, the robot will spaz in an odd fashion. Tilden worked around
this by having different lengths for his sensors, so that such a
situation *may be impossible*.
The photodiodes are simply connected to the enables of the leg driver chip, so when light is detected it sends a positive signal to the respective enable, therefore disabling the legs on one side. A disadvantage of this is if both photodiodes have light incident on them, the bot won't move its legs.
CH-CH-C-CHANGES
I made several changes to the original circuitry. The PNC was replaced with a diode auto PNC startup circuit. I also brought out the outputs and inputs of the microcore, and the motor outputs to header pins. This is so that I could plug in some debug boards with LEDs to tell what is going on in the bot's brain.
|
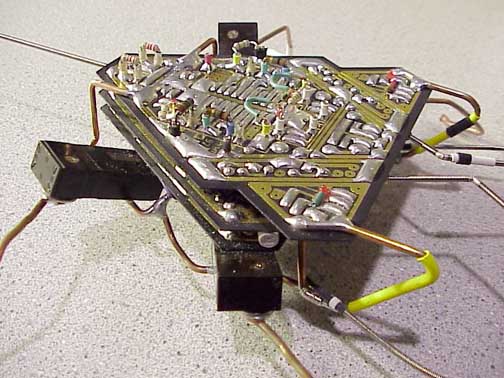
Dradis is a 5 motor walker based on Mark Tilden's original Vbug 1.5 Walkman.
|
 ELECTRONICS
ELECTRONICS