BEAM Robotics- based on Nervous Network Technology
| Spyder | |||||||||||||||
|
|
MECHANICAL DESIGN
Spyder was a quadruped, each leg having 2 motors, presumably for lift and yaw.
In addition, the legs each consisted of a 4-bar linkage, a system used for lifting
the foot
LEGS
MECHANICAL DIAGRAMS
There were no exacting Diagrams of Spyder's leg mechanics, save for the photographs of the robot.
The ones taken by Dave at Solarboticsprovide the best and most intimate detai ls of the workings.
BRUCE'S DIAGRAMS
From Bruce's position Diagrams, we clearly see the oddity of the leg mechanics,
in which the linkage is lowered to raise the foot.
This is due to the fact that the OTU itself forms a bar of the 4 bar linkage,
and the foot is connected to the OTU's casing. In addition, since the OTU is a bar,
as it moves it will rotate a little. The spring attached
AMIT'S DIAGRAMS
Download the pics, they are hi-res and easier to read under magnification. I've terrible writing.
The first diagram is essentially the same layout as Spyder, with some cosmetic changes and as OTUs
were not available, |
||||||||||||||







|
SEMI-RIGID LINKAGE
You can attach the brass tubes directly to the motor shafts and omit the
springs. Not a problem there.
The spring in the brass tube is a normally compressed spring,( you pull it, it
extends, release it and it contracts again).
Now one end of the spring is connected to the motor output shaft, the whole
thing placed inside the brass tube and the other end of the spring is connected
to the end of the tube.The end of the brass tube housing the spring is soldered to
the respective partof the linkage.The one for the yaw motion is connected to the 4-bar linkage
, and there is another spring thing in the lower link of the 4-bar linkage as well. If you look
carefully, the fixed end(where the spring is soldered to the tube) is also
soldered to a length of thick wire. Together these make up the entire lower linkage.
You can see this in the hi-res pics.
Altogether, it creates a flexible linkage under certain conditions. In normal
operation, the spring remains within the tube and acts as a solid linkage. In
fact,depending on how far the spring is retracted within the brass tube, the
force is directed along the brass tube rather than
MOTORS This robot used 8 (Namiki?) pager motors.These were mated to the OTU geared stage. One could use any geared motor, but changes would have to be made at least to the 4-bar linkage system. The leg mechanics sketches above show such a change.
GEARED STAGE
Spyder uses 8 OTUs as the geared stage of its motors. They are a gearset which one can
salvage from analogue stove timers, electric analogue clocks, dishwashers, and old washing machines.
CHASSIS FRAME
Spyder is built around a square wire frame. Each of the yaw OTUs are soldered to this square's vertices.
The battery is placed in the middle of this frame and a spring stretched between two sides holds it in place.
Other wire sub frames are soldered to this, these include: REPLICA FRAME
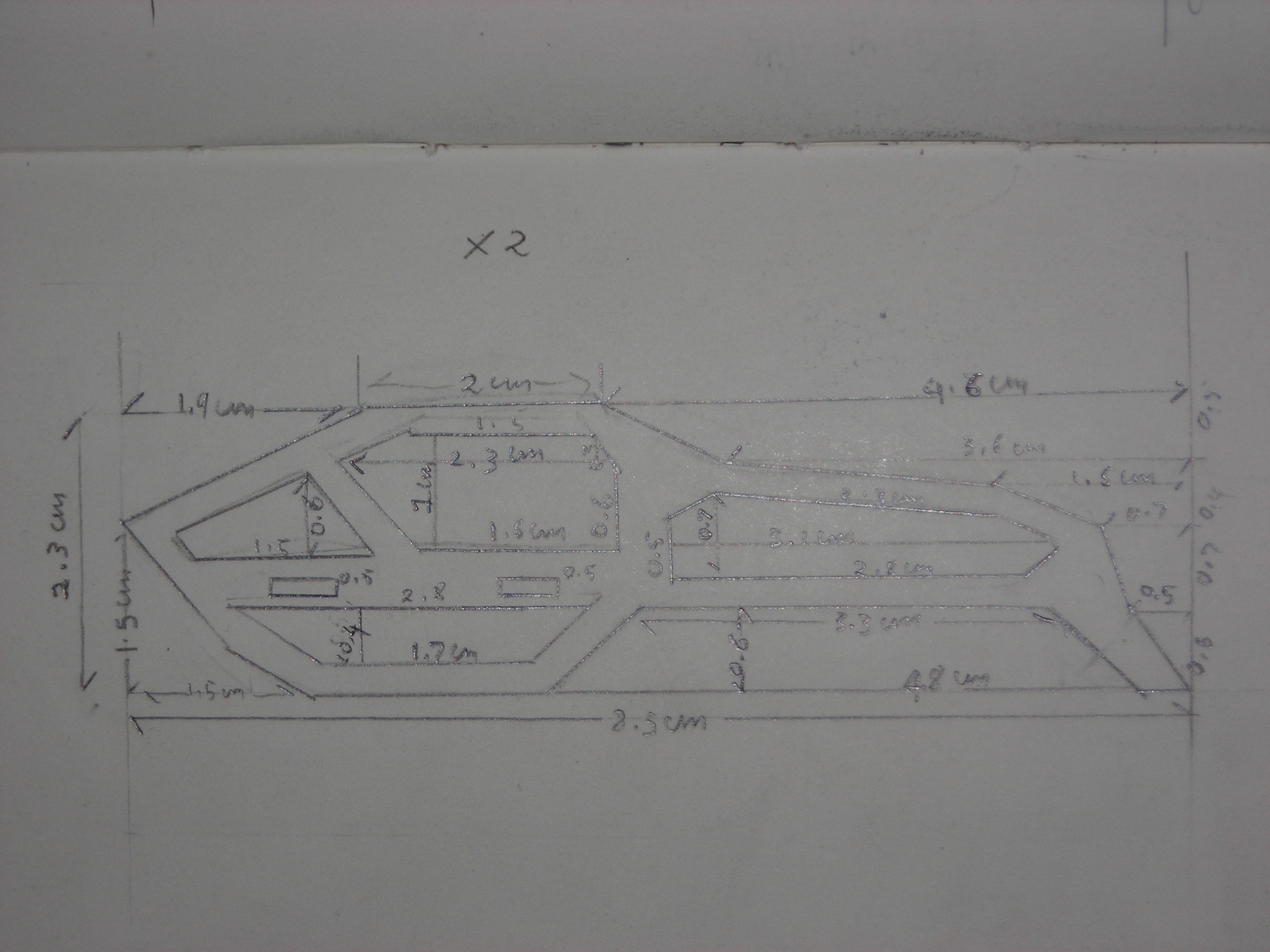
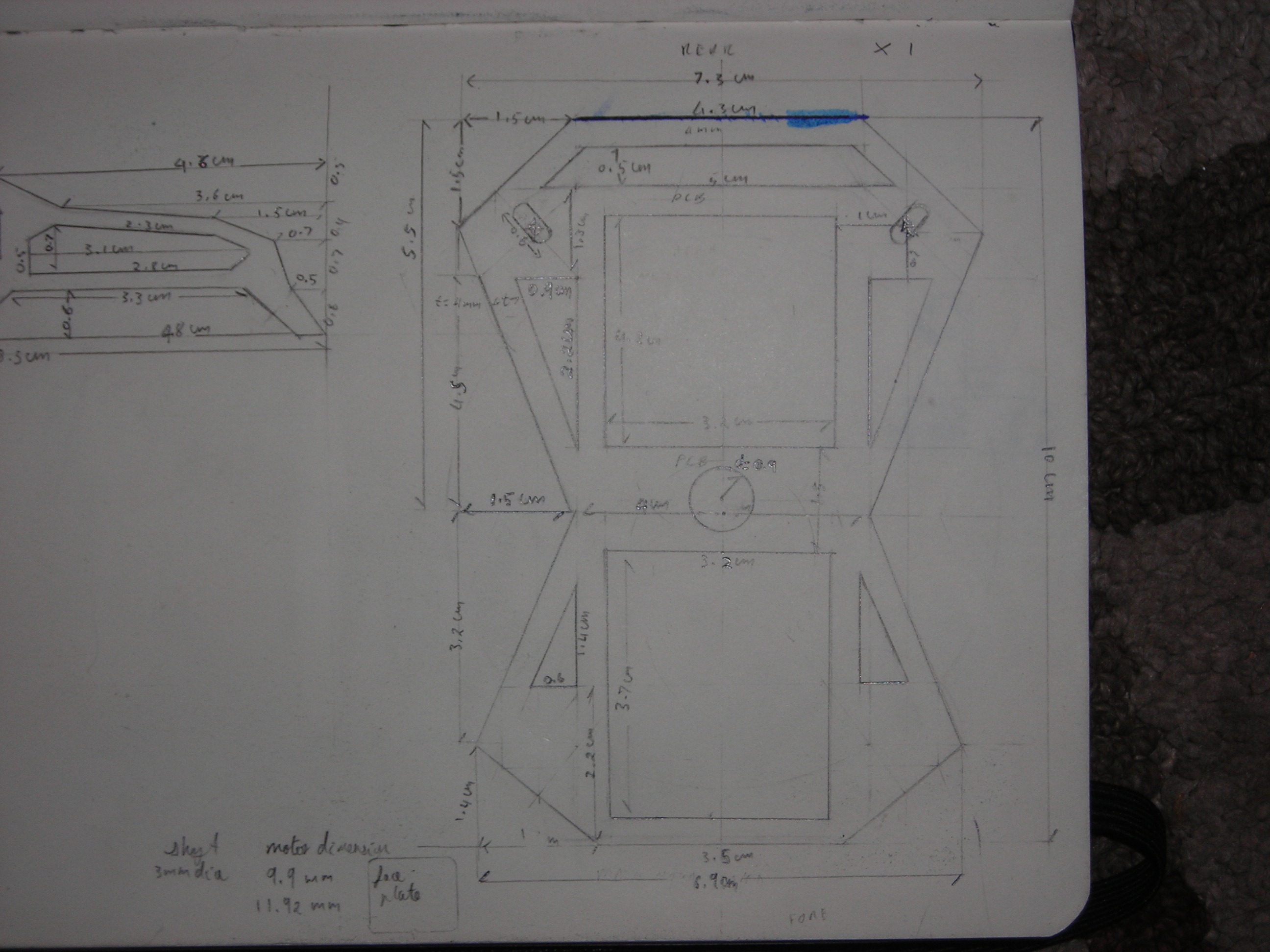
A frame will be built from double-sided fibre glass PCB.
It will have a simple geometrical shape, and will use
mortis and tenon locking systems to join structural parts together.
In addition, because the board is copper clad, the joints may be soldered
in place. This means that the frame is both strong, and light. Furthermore, the
inner area of the frame can be filled with another pcb of similar dimension,
[tesselation] . This board will have some of the robot's electronics.
Frame sketches & CAD files:
|
Scale drawings,pdf(2010/08/12)
|
AUTOCAD DWG
|
... |
|||||||||