BEAM Robotics- based on Nervous Network Technology
| Spyder | |||||
|
|
MECHANICAL DESIGN
Spyder had 8 DC gear motors, made from a pager motor and an OTU. The replica shall use Solarobtics
GM12As.
The orginal Spyder used (I think) a basic 74AC245 driver. Info on those can be found at: | 74*245-based Motor Driver |
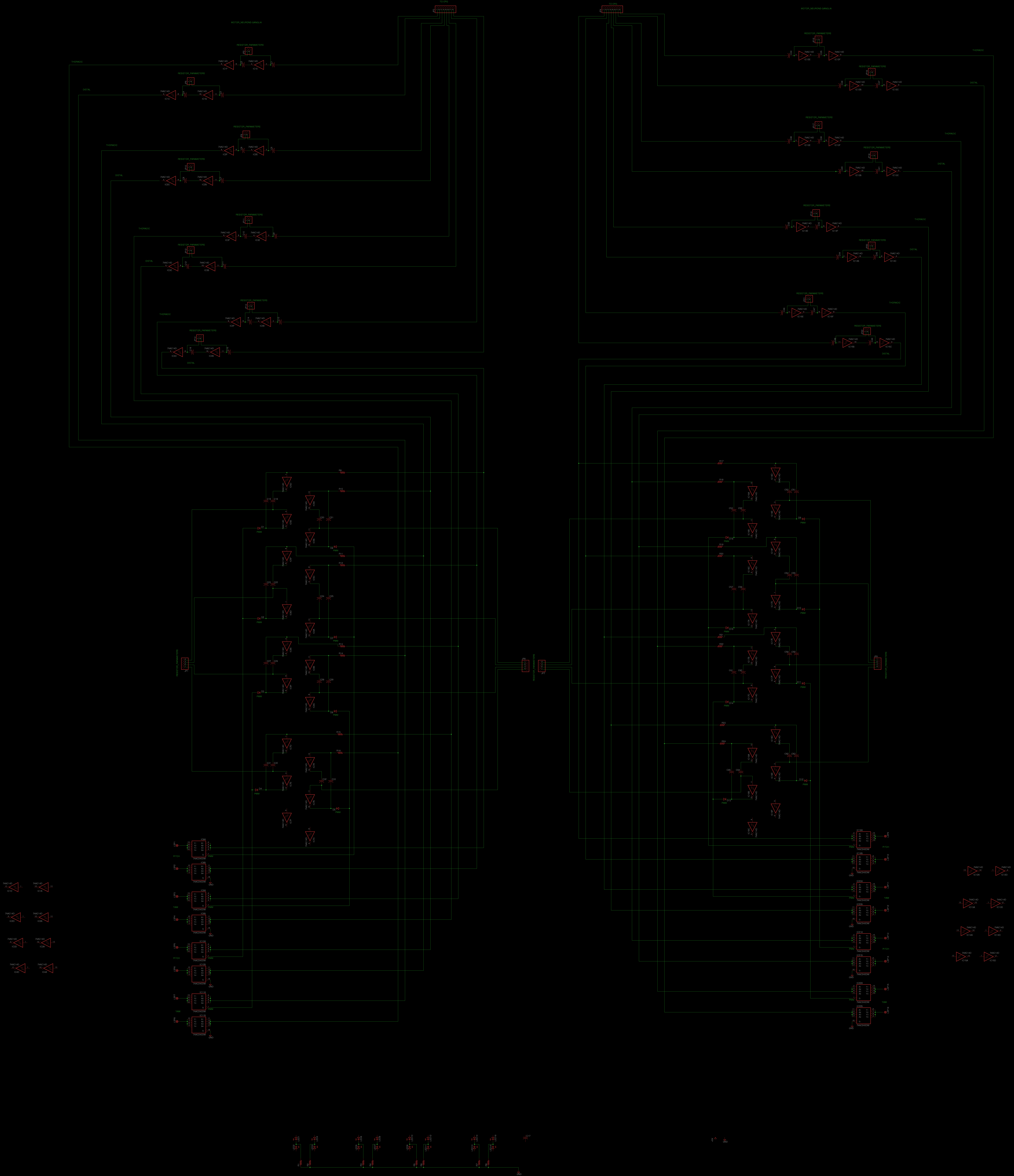
CIRCUIT DIAGRAMS
The Replica's motor driver is a nervous network based on the
A-net over in the experiments/
|
Topologies
|
page.
Eagle Files:
Schematics & Boards |
||||